
结构智能集成一体化要求装备通过结构设计与集成,实现形状、性能和功能在时间和空间维度上可控变化,在不同模态或不同环境下实现变形、变性和变功能的“三变”。目前的力学超结构(超材料)已经难以满足日益提高的应用需求。智能驱动力学超结构(超材料) (Active Mechanical Metamaterials, AMMs) 是一类具有感知外界激励、主动判断并作出响应功能的材料,能够通过“感知-响应”来满足应用场景的需求和模态变化,受到了科学家的广泛研究。AMMs内部精巧的人工设计微结构和自身智能材料的刺激响应特性,使其不仅继承了力学超结构的超常力学性能,还具备了强大的驱动功能。AMMs的微观和宏观结构是根据几种基本的力学构筑原理设计的,即相变原理、应变失配原理以及力学失稳原理。考虑到刺激响应材料的可控性和实际工作效率,研究人员使用温度、化学物质、光、电、磁场和压力作用这些外部物理场作为激励场。金沙威尼斯士李营教授团队应邀从力学构筑原理和刺激响应材料两方面,系统性地总结了AMMs的前沿工作和最新进展(如图1),对比了不同类型AMMs的特点和适用场景,并讨论了AMMs的功能和工程应用,最后简要描述了该领域目前存在的问题和发展前景。这篇综述有望为AMMs的后续研究工作提供依据和启发。
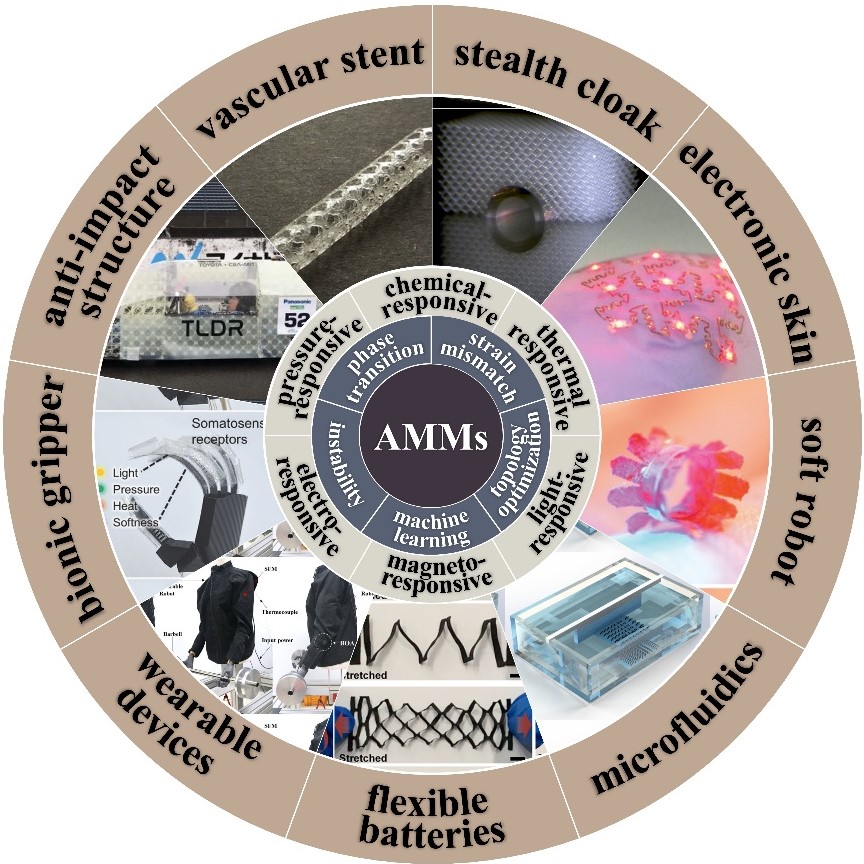
图1 智能驱动力学超结构的构筑原理、驱动物理场以及应用
作者将AMMs的力学构筑原理归纳为主要的三大类。首先是相变原理。相变原理是指当外力(如温度、外力)不断作用于材料直至某一特定条件时,导致材料微观结构的变化和宏观上的状态变化。最常见的相变现象是材料在固态、液态和气态之间的相互转化。在相变过程中,各组分之间的分子间相互作用使整个材料经历一系列的性质变化或变形,因此,相变原理可作为一大类AMMs的构造方法。第二种是应变失配原理。应变失配是指介质中应变的不连续变化,常发生在由两种或两种以上不同材料组成的结构中。由于各部分力学性能的不同,在环境或荷载条件的作用下,各组分间不协调的应变导致界面处产生内应力,进而导致结构发生弯曲变形等响应。基于应变失配原理,通过预设的材料部署(例如将两种具有不同热膨胀系数或溶胀率的材料粘合),可以实现具有主动变形能力和可控响应特性的超结构(如图2)。第三种是力学失稳原理,包含了微观和宏观的结构失稳两个层面。在微结构层面,材料被认为是几种相的结合,其中均匀线弹性相具有正定模量,而非正定弹性模量相具有负刚度,这些成分由于相互约束而暂时稳定。根据势能最小原理,微结构材料将按照能量最小的顺序排列,具有非凸能势的材料会跳过均匀变形,迅速跃迁到低势能的位置,表现出相转换、畴变、应变局部化等宏观不稳定性。因此,基于材料失稳的超结构设计的核心是控制加载过程中材料最小势能点的数量和最小势能点出现的时间。在宏观结构层面,力学不稳定表现为屈曲、扭曲、起皱、折叠、压痕等,这些大变形和旋转导致结构的模式转换。基于力学失稳设计的AMMs如图3所示。
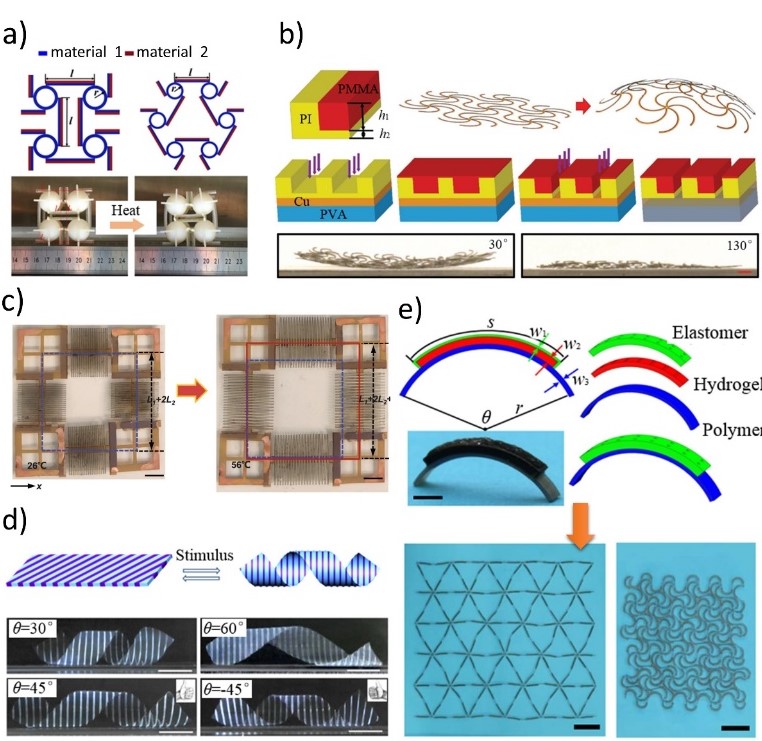
图2 基于应变失配原理的智能驱动力学超结构
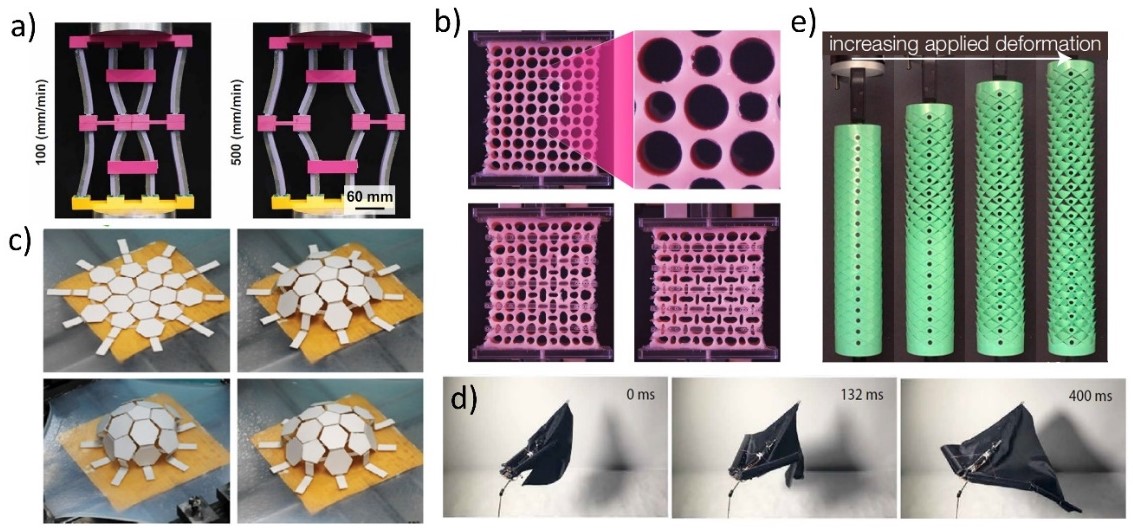
图3 基于力学失稳原理的智能驱动力学超结构
除了力学构筑原理,外激励物理场的可控性和高效性也是AMMs的重要参考依据。(1)热驱动型AMMs,常用的材料包括形状记忆聚合物或合金、过度金属氧化物、热响应液晶弹性体和热响应水凝胶等,由于其控制手段简便而被应用得最为广泛。如图4(a)所示,结合手性构型和形状记忆聚合物,研究人员开发出了力学性能可调节、变形可恢复的智能超结构;图4(c)展示了一种多材料水凝胶血管支架,能够在人体中进行受控的药物输运和药物释放;如图4(f)则是一种能够通过环境温度调节其力学性能的折纸结构。实际上,后面几类基于电热、光热和磁热原理的AMMs,本质上都属于热驱动型。(2)化学驱动型AMMs主要基于结构与环境之间的化学反应,取材非常广泛,如化学响应水凝胶、金属离子、化学活性聚合物等。其驱动策略是将化学响应材料的置于如水、酸、有机或离子溶剂等液体环境中,通过结构设计,让AMMs在受到外部化学刺激时呈现出可控变形。化学响应具有精确控制和响应灵敏的特点,适用于各种微型系统。(3)光驱动型AMMs是通过在聚合物网络中混合光响应官能团作为分子开关或光热转换剂来实现的,大致可分为光化学反应和光热反应。受到外部光源的刺激,光响应组分发生变形,从而引发整体结构在宏观尺度上的变形或移动。如图5(f)所示,研究人员结合剪纸结构和光响应液晶聚合物网络设计了一种能够在光源的引导下完成滚动、转向和爬坡等动作的棘轮形机器人。(4)电驱动型AMMs也可以分为两大类。第一种是利用导体中电流产生的热能来驱动机械变形,仍然属于热驱动。代表性的是基于电热效应的导电形状记忆聚合物和合金。另一种类型的电响应AMMs则是将外部电响应转化为物理或化学反应。如电化学响应材料、电活性聚合物、介电弹性体和离子聚合物-金属复合材料等。电驱动型AMMs应用方便,但目前大多数产品都需要接线工作,这是制约其发展的因素之一。(5)磁驱动型AMMs是目前最热门的智能超结构之一,由于其响应灵敏、远程控制、安全无害等优点受到了研究人员的青睐。代表性的有将磁性颗粒和软材料基体混合制备的磁软材料。其中,以羰基铁、四氧化三铁为代表的软磁性颗粒具有较小矫顽力和低剩磁,难以保持磁化方向,但其制备和应用相对简单;以钕铁硼为代表的硬磁性颗粒具有较大的矫顽力和高剩磁,经过磁化后能够保持磁化方向,从而被外部磁场精确地驱动,因此适用于对控制精度要求更高的场景。如图6所示,结合力学超结构构型,研究人员已经开发出多种磁驱动型AMMs。(6)压力驱动型AMMs使用便捷,近年来也受到了大量关注,只要在软材质基体内设置通道或空腔,并通过充放流体的方式产生压力,就能够改变超结构的形状或使其产生运动。但是这种方式也有包括控制精度较差、需要流体通道等问题,难以运用到精密系统中。总的来说,根据不同的使用场景选择合适的刺激响应材料来制备,能够更好地发挥AMMs的力学特性和智能驱动特性。
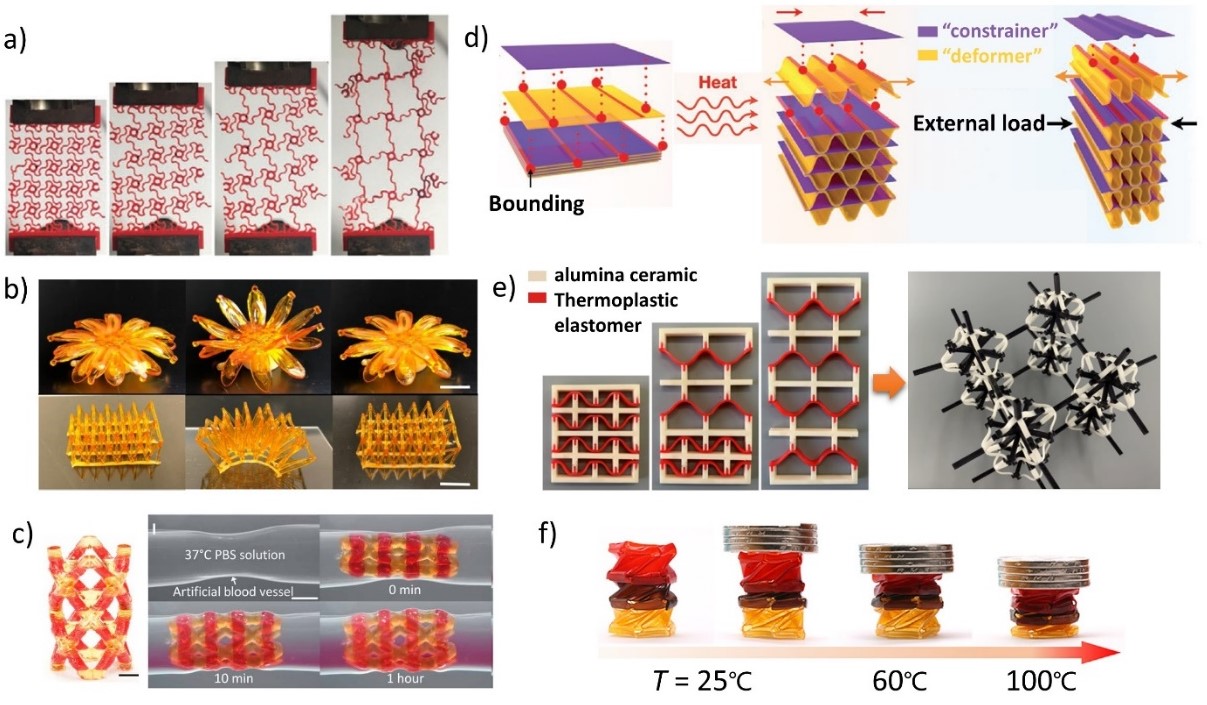
图4 热驱动型智能驱动力学超结构
图5 光驱动型智能驱动力学超结构

图6 磁驱动型智能驱动力学超结构
论文还总结了AMMs在各种领域的用途,有以爬行和游泳微型机器人为代表的智能机器人领域。包含微流控系统、微型驱动器、超疏水表面、柔性电池在内的各种微型化系统。包括智能抗冲击结构、智能隐身斗篷、力学声学和电磁隐身设备、智能天线在内的工程机械领域。包括柔性电子、仿生皮肤、仿生组织超结构、血管支架、靶向运输载体等在内的生物医学领域。AMMs在这些领域都发挥着重要的作用,并且具有非常广阔的应用前景。随着力学和材料学的不断发展,未来将出现更多的新型智能驱动力学超结构,为生产生活提供动力。
该综述文章以Recent Progress in Active Mechanical Metamaterials and Construction Principles为题发表在Advanced Science(影响因子16.806)上。在金沙威尼斯士的指导下,博士研究生齐骥翔为本文的第一作者,李营教授和陶然副教授为本文的共同通讯作者。方岱宁院士团队的爆炸毁伤与先进防护结构小组成立于2017年,主要从事先进防护材料与结构设计,智能力学超结构设计制造等研究。本文通讯作者李营教授主要从事爆炸冲击与多功能防护设计、力学超结构设计和制造等研究,担任爆炸科学与技术国家重点实验室研究部主任,中国力学学会水中爆炸动力学组副组长、航天材料标准委员会委员等职务,获国家万人计划青年拔尖人才、中国科协青年托举人才、学会优秀博士论文等。通讯作者陶然副教授主要从事高性能复合材料,智能复合材料结构的制造工艺、力学设计和实现技术研究。
课题组招收力学、复合材料、兵器、机械、船舶等学科博士后,待遇从优,可面谈。邮箱bitliying@bit.edu.cn。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/advs.202102662